
- Innovation créatrice de nouvelles compétences
- Oui
- Innovation génératrice de nouvelles activités
- Oui
- Phase de développement de l'innovation
- Commercialisé depuis plusieurs années
- Date de création
- Date de mise à jour
En bref
Des équipementiers comme Valéo ou Bosch ont développé des systèmes permettant d'obtenir une vue à 360° autour du véhicule pour les manœuvres à basse vitesse.
Des caméras envoient les images à un système de traitement pour ensuite délivrer une image couleur au conducteur. Celle-ci s'affichera sur l'écran de l'interface homme-machine du véhicule.
Ainsi, un tel système propose au conducteur une multitude de vues et de modes de réglage qu'il va choisir en fonction de la situation routière et de l'information souhaitée.
- Innovation créatrice de nouvelles compétences
- Oui
- Innovation génératrice de nouvelles activités
- Oui
- Phase de développement de l'innovation
- Commercialisé depuis plusieurs années
- Date de création
- Date de mise à jour

Description détaillée
Des caméras à l'avant (souvent un peu latérales au niveau du pare-choc avant) permettent d'obtenir des images lorsque la visibilité est restreinte (brouillard par exemple), ou lorsque le véhicule s'engage dans des rues ou ruelles en détectant les obstacles immédiats (piétons, cyclistes, etc.).
Une caméra "grand angle" à l'arrière permet de réaliser des manœuvres de stationnement en sécurité. Dans ce cas, le système vient en complément des capteurs à ultrasons (aide au stationnement classique). Car les coins ne sont pas surveillés dans le cas d'une caméra unique à l'arrière. Sur l'écran, lors de ces manœuvres, on peut obtenir des surimpressions de la trajectoire prise par le véhicule (option). C'est pourquoi un tel système est complémentaire des radars de recul classiques. La caméra arrière couplée aux radars de recul est un système qui équipe de nombreux véhicules. Le système "360°" est plus complet car il couvre l'intégralité du périmètre.
Enfin, dans chaque rétroviseur extérieur on trouvera une caméra. Le périmètre latéral proche du véhicule est ainsi surveillé. L'évaluation des distances latérales est donc facilitée.
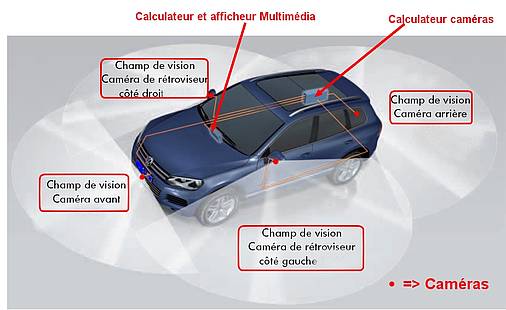
Dans le système utilisé par VAG depuis 2011, notamment sur le Touareg, 4 caméras sont mises en œuvre. Ce système est dénommé "Area View", il est couplé au déjà existant "Rear View" ou caméra arrière.
- La caméra avant se trouve dans la grille de calandre,
- la caméra arrière est montée dans la poignée du hayon,
- les caméras latérales sont dans la face inférieure des rétroviseurs latéraux.
Les champs de vision des caméras se chevauchent partiellement. Ce système peut générer une transition optique entre les champs de vision de caméras voisines (vue périphérique appelée « Bird View », littéralement « vue à vol d'oiseau », c'est-à-dire « vue aérienne » du système VAG).
Exemple de fonctionnement de ce système :
Area View fonctionne dans la plage de vitesses de 0 à 15 km/h. Lorsque le système est activé, les caméras donnent une vue périphérique du voisinage du véhicule.
Lorsque l'on passe en marche arrière ou que l'on actionne la touche d'aide aux manœuvres de stationnement, l'écran de l'autoradio, ou l'écran tactile de la radionavigation, affichera la vue aérienne (Bird-View).
Le conducteur peut choisir sur l'écran tactile l'une des caméras pour n'avoir que la vue sélectionnée (avant-arrière-droite-gauche). Mais en touchant "le toit du véhicule de la perspective" on repasse en vue aérienne, donc on voit la perspective complète.
Les images prises sont retouchées par le calculateur de caméras, parce que l'objectif grand angle des caméras cause de fortes distorsions de l'image. Ainsi les angles de vue sont adaptés (par un traitement numérique supplémentaire dans ce calculateur) pour donner la perspective souhaitée.
C'est sur cette image retouchée et en fonction de la perspective choisie que sont superposées les lignes-repères pour l'affichage des distances et la prévision du parcours à suivre.
L'image ainsi préparée est ensuite affichée à l'écran de la radionavigation ou de l'autoradio (selon les équipements disponibles et les millésimes).
Les modes de fonctionnement possibles sont :
-Perspective aérienne (plongée sur l'intégralité du véhicule).
-Circulation transversale (angle de 90° avant droit et/ou gauche ou idem arrière).
-Emplacement de parking (caméra avant ou arrière et lignes repères).
-Vues côté droit et gauche (plongeant latéral et lignes repères des obstacles).
-Aide à l'attelage d'une remorque (1 ligne repère vers le crochet et vue plongeante arrière).
-Tout terrain (plongeant caméra avant).
Un calculateur (ou ECU en anglais), gère la fonction. Il peut générer une vue en technologie 3D pour représenter des visuels réalistes de l'environnement immédiat du véhicule.
Les caméras utilisées dans le système sont basées sur la technologie CMOS (Complementary Metal Oxide Semiconductor).
La qualité par fort contraste, sous luminosité réduite, comme à l'entrée d'un garage souterrain, est généralement optimum.
L'angle de vision s'approche des 172° et la déformation de l'image due à cet angle, "fish eye", un peu comme une image étirée sur les bords, est corrigée par l'algorithme de traitement du système d'analyse.
Couplé aux radars de recul arrière et ou avant, le système affichera les distances des obstacles sur l'écran.
Exemple de caractéristiques réelles chez VAG :
● Résolution : 640 x 480 pixels (résolution VGA)
● Angle d'ouverture : 190 ° (> espace semi-infini)
● Capteurs constitués de puces CMOS-Imager de ¼ de pouce
● Plage de températures : de - 40 à 85 °C

Exemple d'architecture Touareg 2011 :
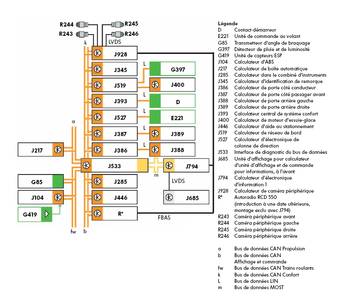
source VAG
Les caméras sont raccordées au calculateur de caméra périphérique par des câbles HSD (High Speed Data). Ces câbles assurent l'alimentation en tension et le pilotage des caméras, ainsi que la transmission numérique des signaux vidéo via LVDS (Low Voltage Differential Signaling, liaison bifilaire).
La liaison entre le calculateur de caméra périphérique et le calculateur d'électronique d'information 1 (J794) a lieu via un câble coaxial (FBAS - Signal d'exploration et de synchronisation d'images en couleur d'un débit d'environ 6 Mbits/s).
Le calculateur de caméra périphérique reçoit de nombreux signaux d'autres calculateurs. Le calculateur de caméra périphérique ne fait qu'afficher les signaux reçus sous une forme graphique, sans avoir une influence fonctionnelle sur d'autres systèmes (par ex. affichage de lignes-repères dynamiques en fonction de l'angle de braquage).
Le calculateur de traitement réalise, entre autres, la retouche des images pour supprimer les distorsions, les calculs et la transposition suivant les différentes perspectives ainsi que la superposition de lignes-repères statiques et dynamiques.
Exemples de rendus du système Bosch: (sources des médias: Bosch)





| Diffusion sur le marché | Ce type d'équipement est disponible sur les segments haut de gamme de la plupart des constructeurs mondiaux. |
|---|---|
| Constructeurs concernés | Tous les constructeurs sont concernés. Le nom donné au système peut varier selon la marque. |
| Innovation engendrant des entretiens | Non |
| Innovation engendrant des réparations | Oui |
| Types de réparations | Remise en état du faisceau. |
| Dispositif législatif en rapport avec l'innovation | Non |
| Contrôle technique | 360° vue ou multicaméras n'entre pas dans le champ d'application du contrôle technique VL. |
| Mots-clés | Caméra, recul, stationnement, conduite, aide, affichage, vue, view |
Méthodes et pratiques
Les techniciens doivent effectuer des mises à jour des données lors d'évolution des fonctions.
Les techniciens peuvent également être amenés à réaliser des diagnostic-Remplacement d'éléments englobant les caméras suite à un dysfonctionnement.
Exemple de procédures:
Si un décalage de l'image devient nettement perceptible dans les zones de chevauchement des champs de vision de caméras voisines, le système doit être recalibré à l'atelier. Le contrôle du décalage de l'image doit être effectué après la stabilisation de la suspension pneumatique au niveau normal et avec l'amortissement réglé au degré « Confort ».
Suite à un changement de caméra, l'alignement des caméras en vue 360 sera moins précis. Pour obtenir un alignement correct, il est nécessaire de faire une auto calibration. Cette action est à réaliser par le client via une phase de roulage pouvant mettre plusieurs heures (selon les conditions extérieures). Cela est souvent nommé "apprentissage".
Pour les opérateurs comme pour les techniciens, il faut s'assurer de la propreté de la lentille des caméras et qu'il n'y a pas d'obstacles sur le champ des caméras.
Attention, il ne faut pas utiliser de nettoyeur haute pression au niveau de ces caméras.
| Métiers concernés | Carrossier et Peintre, Mécanicien technicien VI-VU, Mécanicien-Technicien Auto |
|---|
Impact sur les compétences en atelier
Les techniciens doivent :
- Être en mesure d'identifier et intervenir sur les systèmes multimédia pour réaliser des diagnostics
- Connaître le principe des caméras numériques et des interfaces IHM.
- Exploiter et utiliser des équipements de tests et de calibration des caméras
Les non techniciens doivent:
- Être en mesure d'identifier et intervenir sur les systèmes multimédia pour réaliser le remplacement ou la dépose-repose des caméras ou des éléments englobant des caméras (comme des rétroviseurs ou des parebrises).
- Exploiter et utiliser des équipements de tests et de calibration des caméras
Exemple d’outillage approprié
Outil de diagnostic
Outils de calibration
Maintien de tension homologué (à forte capacité)
À lire aussi dans la même section

La réalité augmentée
La réalité augmentée, c'est l'intégration d'éléments virtuels dans l'environnement réel entourant l'utilisateur.
Pour cela il est possible d'utiliser plusieurs types de support :
- En projetant l...

La navigation connectée
La mobilité du futur a déjà commencé. De nombreux constructeurs et équipementiers mettent en œuvre des systèmes complexes pour la navigation connectée avec ou sans gestion du régulateur de vitesse...

Caméra Stéréo
Les systèmes d'aides à la conduite reposent sur différents capteurs. Parmi ceux-ci on retrouve souvent une caméra mono, c'est-à-dire un seul capteur vidéo. Mais les équipementiers développent depuis...

Systèmes d'aide au stationnement VALEO
De nombreux systèmes d'assistance au stationnement sont mis en œuvre depuis le milieu des années 2000.
Simple avertisseur de distance, ils ont progressivement évolués vers des systèmes imbriqués avec...